|
ASME 2005 Regional Design Contest
Stair Climbing Robot
For the 2005 ASME design contest
the challenge was to build a device to carry rice up three stairs, take a
right turn, go down a stair, and then finally dump the rice in a bin.
I built a device for Duke University and placed 2nd in the regional
contest, carrying 17 pounds of rice, all in one trip. This is an impressive
feat considering my robot only weighed 7 pounds.
Here I am extending the
rice boxes, loading the rice, and also reaching the top stair.

Rice Dump Video
The device worked using linear actuators to lift the front half of the device
higher than the stair. Then it would drive forward and shift the weight
of the device onto the stair by moving the entire rice bin forward.
It would then lift the back half of the device up and continue the process.
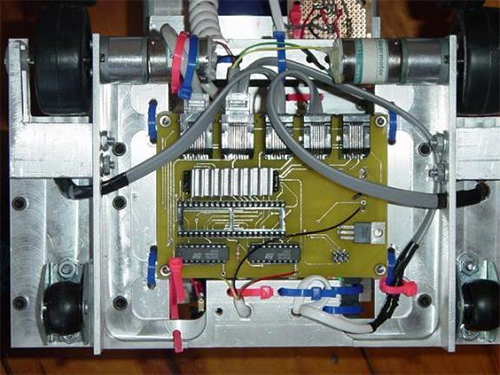
The robot was fairly complicated with five DC gearhead motors and four stepper
motors. Instead of doing point-to-point wiring I designed a circuit
board and had it made by www.expresspcb.com.
The heat-sinked chips shown below are the stepper motor drivers, below that
is a socket for an AVR 8535 microcontroller, and below that are the two H-bridge
DC motor drivers. I programmed the AVR in assembly code and program
ended up being about 1000 lines. Next time I will most likely spend
the money to buy a good C compiler instead.
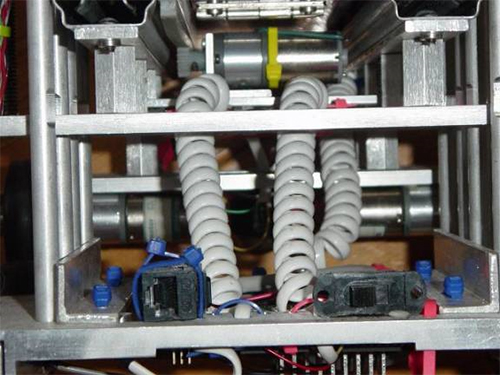
Back view of the device. You can see the motor used to
shift the rice with a pinion gear and gear rack. The box is attached
with drawer glides so it slides back and forth smoothly. Telephone cord
was used so that the two parts of the devices could move apart and still be
wired together.
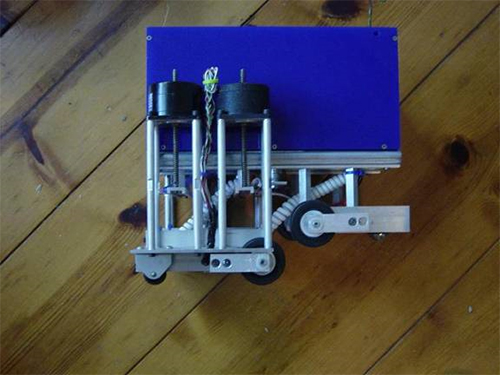
Side view of the device showing the linear actuators.
Copyright © 2005 –
All Rights Reserved
|

