Distributed Fault-Tolerant Wireless Controller Grids
Menu:
News:
June 2013:
We have been invited to present our EVM work in Journal of the Indian Institute of Science!
February 2012:
Invited talk at the NAMUR (International user association of automation technology in process industries) meeting dedicated to potential use of wireless in process industries!
June 2011:
EVM wins the Honeywell Users Group 2011 Wireless Student Competition!
June 2011:
EVM presented at the EU-USA CPS meeting!
November 2010:
EVM paper accepted for publication in
ACM Transactions on Embedded Computing Systems (ACM TECS)!
April 2010:
EVM for robust wireless control paper presented at
RTAS'10
December 2009:
EVM for robust wireless control paper accepted - IEEE RTAS
@CPSWEEK!
April 2009:
EVM demonstration at the CPS Week in San Francisco
Project Overview:
The goal of this project is to further research in the area of small wireless controller grids composed of many wireless nodes, each sharing a common sense of the control application, without regard to physical node boundaries. Our focus is on the design and implementation of wireless controllers and in providing such controllers with runtime mechanisms for robust operation in the face of spatio-temporal topological changes. We have designed the Embedded Virtual Machine (EVM), a powerful and programmable runtime abstraction where a collection of physical nodes is composed into a single Virtual Component (VC). The virtual machine allows migration of the controller tasks from one physical node to the most competent set of physical nodes, in the presence of node and link failures while maintaining the control law and timeliness requirements. In the context of process and discrete control, an EVM is the distributed runtime system that dynamically selects primary-backup sets of controllers given spatial and temporal constraints of the underlying wireless network - thus, introducing new capabilities such as predictable outcomes during sensor/actuator failure, adaptation to mode changes and runtime optimization of resource consumption.
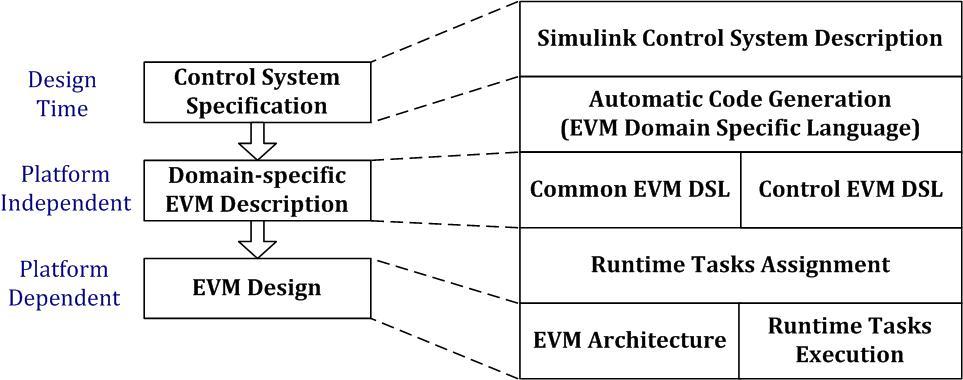
We have utilized the EVM to develop a 3-layered design process to allow control engineers to design wireless control systems in a manner that is both largely platform/protocol/hardware/architecture independent and extensible to different domains of control systems (e.g., process control, aviation, medical). The design flow starts from a control problem formulation in Simulink, then performs automatic translation of control models from Simulink to the platform-independent EVM interpreter-based code and finally to platform-dependent binaries, which are assigned and executed at physical nodes within a VC.
The EVM has been implemented on the FireFly wireless sensor nodes and MSP430 based wireless sensor network platforms.
People:
University of Pennsylvania
Miroslav Pajic
Prof. Rahul Mangharam
Honeywell Process Solutions
Paul McLaughlin
Alexander Chernoguzov
Papers:
-
Rahul Mangharam and Miroslav Pajic, "Distributed Control for Cyber-Physical Systems", Journal of the Indian Institute of Science, 2013. Invited paper.
-
Miroslav Pajic, Alexander Chernoguzov, and Rahul Mangharam, "Robust Architectures for Embedded Wireless Network Control and Actuation", ACM Transactions on Embedded Computing Systems, 2012.
-
Miroslav Pajic and Rahul Mangharam, "Embedded Virtual Machines for Robust Wireless Control and Actuation", Proc. of the 16th IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS), Stockholm, Sweden, 2010.
-
Rahul Mangharam and Miroslav Pajic, "Embedded Virtual Machines for Robust Wireless Control Systems ", Proc. of the 29th IEEE International Conference on Distributed Computing Systems Workshops (ICDCSW), Montreal, Canada, 2009.
Reports:
-
Miroslav Pajic and Rahul Mangharam, "Embedded Virtual Machines: Architecture Description", Technical Report ESE-2009-01, January 2010.
-
Miroslav Pajic, "Assignment Problem: Control Tasks Assignment", Techical Report, July 2009.
-
Rahul Mangharam, Miroslav Pajic, and Shivakumar Sastry, "Embedded Virtual Machines for Wireless Industrial Automation", Demonstration at IEEE/ACM CPSWeek, April 2009.
Videos:
Note: Embedded videos can not be seen in Internet Explorer 6 or earlier
EVM Demo 1 - Wireless Factory Demo
EVM Demo 2 - Adding backup controller
EVM Demo 3 - Planned migration of a Control Algorithm
EVM Demo 4 - Unplanned migration of a Control Algorithm