Space
Space is important in cultural, social, biological and physical systems.
How do we represent space in simulations?
By its dimensionality.
By its texture.
By its granularity.
|
Space is represented dimensionally by: Simulations may behave differently when using different representations of space... |
|
|
We can represent it as a bounded plane
|
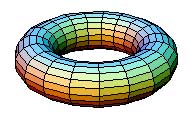
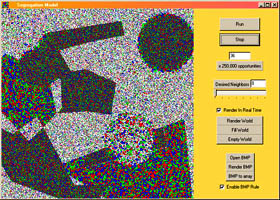
We can represent it as a wrap-around torus
|
|
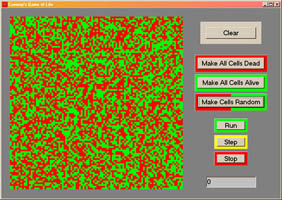
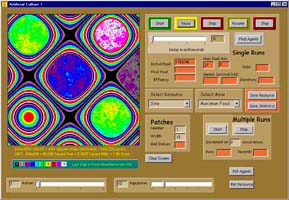
A toroidal world looks superficially like a bounded plane. But there is a difference. On a flat representation of a toroid if you move off the screen to the left, you return to the right. If you move below the bottom, you return to the top, etc. Consequenmtly, the neighborhoods in that space can be confusing as illustrated in the application below. The executable and source code are here. |
|
 |
|
|
Space is represented texturally by: Simulations may behave differently when using different representations of space... |
|
|
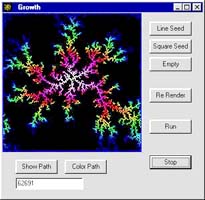
Cells or Rasters (Images) An example: Adobe Photoshop represents space by pixels arranged in grids called bitmaps. Pixels have no knowledge of any shapes they may be part of. Enlarged images are subject to the "jaggies" or "pixellation." Textures can be represented economically, but complex shapes are best left to vectors. |
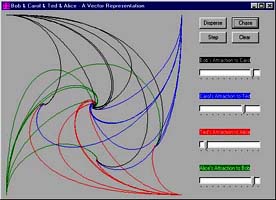
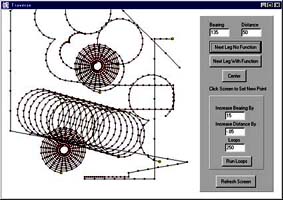
Vectors (Shapes) An example: Adobe Illustrator represents space as geometric shapes (lines, squares, circles, ellipses, etc). Shapes have no knowledge of any pixels which they may contain. Enlarged shapes preserve their sharpness. Shapes can be represented economically, but complex textures are best left to rasters. |
|
Examples of each are shown below: |
|
Space is represented granularly by: |
|
Fine-grained simulations run more slowly but are more precise. |
Coarse-grained simulations run more quickly but are less precise. |