Robots
which for this page means any complex of sensors and
actuators...
|
Robots |
|
Sensors
- Actuators - Encoders
- Steppers - Switches
Pneumatics - Realworld Interfacing - Circuits - Robots |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
Pelco Camera Pan/Tilt Module ECM 6165 24V 14.5RPM and ECM 6164
24V 50RPM motors. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Philips Autodome Camera Pan/Tilt Module Two,
2-phase, 4 Wire, 1.8 degree, 8 ohm, 35mm steppers. Four, SGS-Thomson TEA 3718S Stepper
Driver Chips |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

|
StorageTek Robotic Arm One, Superior
Electric SM-200-0020-HT, 1.0A, 1.8A Two, Yaskawa Electric Inertia Motor, Mini Series. One stepper for the gripper assembly, one DC motor and encoder for each of two other movements: rotation and extension. Quantity 1 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
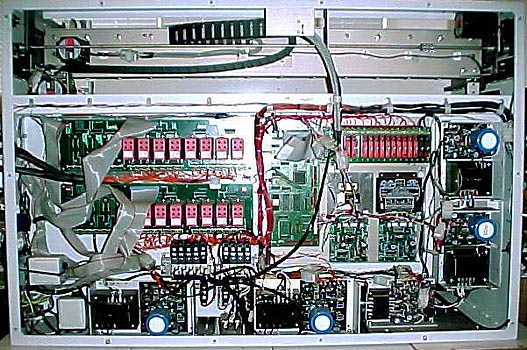
Bohdan Pick-and-Place Robot
|
Front view of the robot (above). Rear view of the electronics with the back panel removed (at left). This is a three-axis robot arm with a gripper. The unit is powered by stepper motors and pneumatics. The stepper motors are visible (left) at the top: two to the left and one to the right, responsible for the X, Y and Z axes of movement. The three stepper-motor controllers are the black and two green boards in the 2x2 square of circuit boards at center right center. Power supplies line the right and bottom sides, each with a large black transformer and all but one with a bright blue capacitor. The two gray units at the lower left are timers. The CPU board is the plain green board at the center. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 X axis stepper motor: Oriental Motor Company VEXTA, Model PK268-02A. Z axis stepper motor: Oriental Motor Company VEXTA, Model PK268-02A-C36 |
All
are 2-phase, 1.8 degree, DC 6 volt, 1.2 amp steppers.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
Ontogen
|
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
Ontogen One complete unit.
|
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
Ontogen One unit stripped of its shell. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 |
Ontogen Two Gilson Model 223 Sample Changers Middleton, Wisconsin |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
About Ontogen: |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
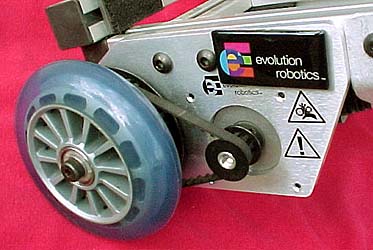 |
Evolution Robotics
ER1 Stepper Platform A 3.4 Volt 1.8 Degree per Step motor. Can be customer wired either as a bipolar or unipolar motor. Evolution Robotics supplies it in a bipolar winding. We have rewired it for unipolar operation. All bicolor wires are center taps and are connected to common.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

|
|
Bally Slot Machine Reel and Motor The old-fashion mechanical slot machine reels did stop at random. No one knew where each reel would stop. The best that can be said for the new slot machine reels is that they are "virtually random." Ironically, the computer knows exactly where each wheel will stop and precisely computes the motion of each reel, its inital spin and slow down, in order to stop it there. The "odds" are precisely controlled by the programmer. The computer might just as well have told the player up front whether she has won or lost, since the spinning wheels are simply smoke and mirrors. The bipolar motor uses the Ericsson PBL 3770A driver chip. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Sold
Sold
|
Ruhle, Farrand
Controls Rotary Inductosyn Rotor A massive 101x114x40mm stainless steel mirror mounted on a 10-degree 3-coil stepper. Can be customer wired either as a bipolar or unipolar motor. Aerospace surplus. Made for Corning. Transducer original cost $1500.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||