import os
import sys
import glob
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
%matplotlib inline
%precision 4
plt.style.use('ggplot')
import scipy.linalg as la
Practical Optimizatio Routines¶
Finding roots¶
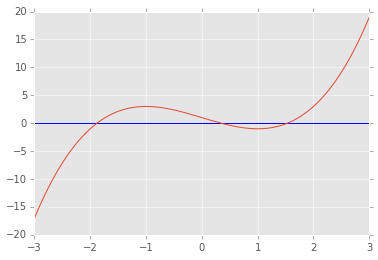
For root finding, we generally need to proivde a starting point in the vicinitiy of the root. For iD root finding, this is often provided as a bracket (a, b) where a and b have opposite signs.
Univariate roots and fixed points¶
def f(x):
return x**3-3*x+1
x = np.linspace(-3,3,100)
plt.axhline(0)
plt.plot(x, f(x));
from scipy.optimize import brentq, newton
brentq(f, -3, 0), brentq(f, 0, 1), brentq(f, 1,3)
(-1.8794, 0.3473, 1.5321)
newton(f, -3), newton(f, 0), newton(f, 3)
(-1.8794, 0.3473, 1.5321)
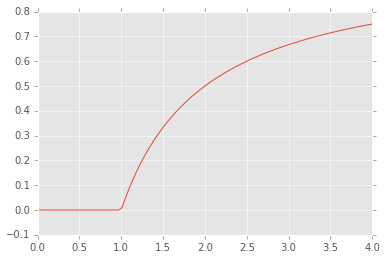
Finding fixed points¶
Finding the fixed points of a function \(g(x) = x\) is the same as
finding the roots of \(g(x) - x\). However, specialized algorihtms
also exist - e.g. using scipy.optimize.fixedpoint.
from scipy.optimize import fixed_point
def f(x, r):
"""Discrete logistic equation."""
return r*x*(1-x)
n = 100
fps = np.zeros(n)
for i, r in enumerate(np.linspace(0, 4, n)):
fps[i] = fixed_point(f, 0.5, args=(r, ))
plt.plot(np.linspace(0, 4, n), fps);
Mutlivariate roots and fixed points¶
from scipy.optimize import root, fsolve
def f(x):
return [x[1] - 3*x[0]*(x[0]+1)*(x[0]-1),
.25*x[0]**2 + x[1]**2 - 1]
sol = root(f, (0.5, 0.5))
sol
status: 1
success: True
qtf: array([ -1.4947e-08, 1.2702e-08])
nfev: 21
r: array([ 8.2295, -0.8826, -1.7265])
fun: array([ -1.6360e-12, 1.6187e-12])
x: array([ 1.1169, 0.8295])
message: 'The solution converged.'
fjac: array([[-0.9978, 0.0659],
[-0.0659, -0.9978]])
f(sol.x)
[-0.0000, 0.0000]
sol = root(f, (12,12))
sol
status: 1
success: True
qtf: array([ -1.5296e-08, 3.5475e-09])
nfev: 33
r: array([-10.9489, 6.1687, -0.3835])
fun: array([ 4.7062e-13, 1.4342e-10])
x: array([ 0.778 , -0.9212])
message: 'The solution converged.'
fjac: array([[ 0.2205, -0.9754],
[ 0.9754, 0.2205]])
f(sol.x)
[0.0000, 0.0000]
Optimization Primer¶
We will assume that our optimization problem is to minimize some univariate or multivariate function \(f(x)\). This is without loss of generality, since to find the maximum, we can simply minime \(-f(x)\). We will also assume that we are dealing with multivariate or real-valued smooth functions - non-smooth, noisy or discrete functions are outside the scope of this course and less common in statistical applications.
To find the minimum of a function, we first need to be able to express the function as a mathemtical expresssion. For example, in lesst squares regression, the function that we are optimizing is of the form \(y_i - f(x_i, \theta)\) for some parameter(s) \(\theta\). To choose an appropirate optimization algorihtm, we should at least answr these two questions if possible:
- Is the function convex?
- Are there any constraints that the solution must meet?
Finally, we need to realize that optimization mehthods are nearly always designed to find local optima. For convex problems, there is only one minimum and so this is not a problem. However, if there are multiple local minima, often heuristics such as multiple random starts must be adopted to find a “good” enouhg solution.
Is the function convex?¶
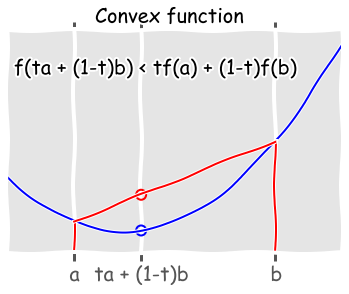
Convex functions are very nice becuase they have a single global minimum, and there are very efficient algorithms for solving large convex systems.
Intuitively, a function is convex if every chord joining two points on the function lies above the function. More formally, a function is convex if
for some \(t\) between 0 and 1 - this is shown in the figure below.
def f(x):
return (x-4)**2 + x + 1
with plt.xkcd():
x = np.linspace(0, 10, 100)
plt.plot(x, f(x))
ymin, ymax = plt.ylim()
plt.axvline(2, ymin, f(2)/ymax, c='red')
plt.axvline(8, ymin, f(8)/ymax, c='red')
plt.scatter([4, 4], [f(4), f(2) + ((4-2)/(8-2.))*(f(8)-f(2))],
edgecolor=['blue', 'red'], facecolor='none', s=100, linewidth=2)
plt.plot([2,8], [f(2), f(8)])
plt.xticks([2,4,8], ('a', 'ta + (1-t)b', 'b'), fontsize=20)
plt.text(0.2, 40, 'f(ta + (1-t)b) < tf(a) + (1-t)f(b)', fontsize=20)
plt.xlim([0,10])
plt.yticks([])
plt.suptitle('Convex function', fontsize=20)
Checking if a function is convex using the Hessian¶
The formal definition is only useful foc checking if a function is convex if you can find a counter-example. More practically, a twice differntiable function is convex if its Hessian is positive semi-definite, and strictly convex if the Hessian is positive definite.
For example, suppose we want to minimize the function
Note: A univariate function is convex if its second derivative is positive everywhere.
from sympy import symbols, hessian, Function, N
x, y, z = symbols('x y z')
f = symbols('f', cls=Function)
f = x**2 + 2*y**2 + 3*z**2 + 2*x*y + 2*x*z
H = np.array(hessian(f, (x, y, z)))
H
array([[2, 2, 2],
[2, 4, 0],
[2, 0, 6]], dtype=object)
e, v = la.eig(H)
np.real_if_close(e)
array([ 0.2412, 7.0642, 4.6946])
Since all eigenvalues are positive, the Hessian is positive defintie and the function is convex.
Combining convex functions¶
The following rules may be useful to determine if more complex functions are covex:
- The intersection of convex functions is convex
- If the functions \(f\) and \(g\) are convex and \(a \ge 0\) and \(b \ge 0\) then the function \(af + bg\) is convex.
- If the function \(U\) is convex and the function \(g\) is nondecreasing and convex then the function f defined by \(f (x) = g(U(x))\) is convex.
Many more technical deetails about convexity and convex optimization can be found in this book.
Are there any constraints that the solution must meet?¶
In general, optimizaiton without constraints is easier to solve than optimization in the presence of constraints. In any case, the solutions may be very different in the prsence or absence of constraints, so it is important to know if there are any constraints.
We will see some examples of two general strategies - convert a problme with constraints into one without constraints, or use an algorithm that can optimize with constraints.
Using scipy.optimize¶
One of the most convenient libraries to use is scipy.optimize, since
it is already part of the Anaconda interface and it has a fairly
intuitive interface.
from scipy import optimize as opt
def f(x):
return x**4 + 3*(x-2)**3 - 15*(x)**2 + 1
x = np.linspace(-8, 5, 100)
plt.plot(x, f(x));
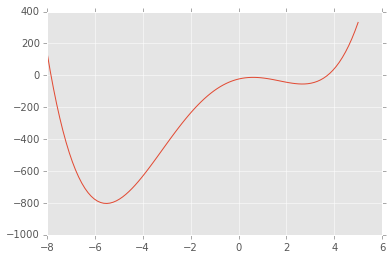
The
`minimize_scalar <http://docs.scipy.org/doc/scipy/reference/generated/scipy.optimize.minimize_scalar.html#scipy.optimize.minimize_scalar>`__
function will find the minimum, and can also be told to search within
given bounds. By default, it uses the Brent algorithm, which combines a
bracketing strategy with a parabolic approximation.
opt.minimize_scalar(f, method='Brent')
fun: -803.39553088258845
nfev: 12
nit: 11
x: -5.5288011252196627
opt.minimize_scalar(f, method='bounded', bounds=[0, 6])
status: 0
nfev: 12
success: True
fun: -54.210039377127622
x: 2.6688651040396532
message: 'Solution found.'
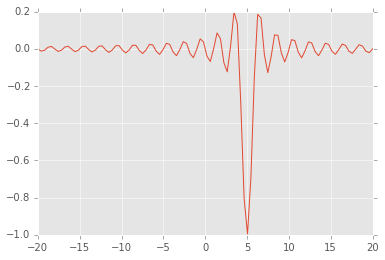
Local and global minima¶
def f(x, offset):
return -np.sinc(x-offset)
x = np.linspace(-20, 20, 100)
plt.plot(x, f(x, 5));
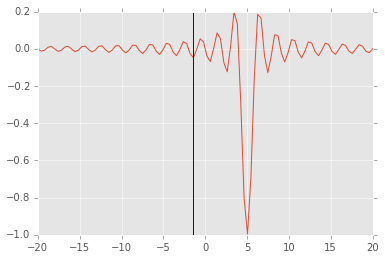
# note how additional function arguments are passed in
sol = opt.minimize_scalar(f, args=(5,))
sol
fun: -0.049029624014074166
nfev: 11
nit: 10
x: -1.4843871263953001
plt.plot(x, f(x, 5))
plt.axvline(sol.x)
<matplotlib.lines.Line2D at 0x115211c90>
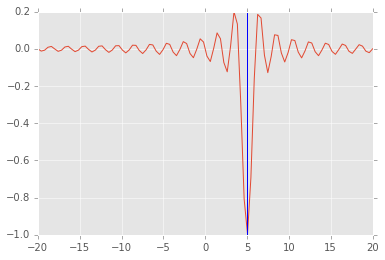
We can try multiple ranodm starts to find the global minimum¶
lower = np.random.uniform(-20, 20, 100)
upper = lower + 1
sols = [opt.minimize_scalar(f, args=(5,), bracket=(l, u)) for (l, u) in zip(lower, upper)]
idx = np.argmin([sol.fun for sol in sols])
sol = sols[idx]
plt.plot(x, f(x, 5))
plt.axvline(sol.x);
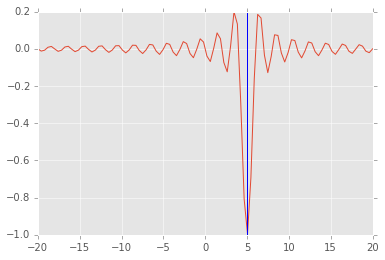
Using a stochastic algorithm¶
See doucmentation for the basinhopping algorithm, which also works
with multivariate scalar optimization.
from scipy.optimize import basinhopping
x0 = 0
sol = basinhopping(f, x0, stepsize=1, minimizer_kwargs={'args': (5,)})
sol
nfev: 2017
minimization_failures: 0
fun: -1.0
x: array([ 5.])
message: ['requested number of basinhopping iterations completed successfully']
njev: 671
nit: 100
plt.plot(x, f(x, 5))
plt.axvline(sol.x);
Minimizing a multivariate function \(f: \mathbb{R}^n \rightarrow \mathbb{R}\)¶
We will next move on to optimization of multivariate scalar functions, where the scalar may (say) be the norm of a vector. Minimizing a multivariable set of equations \(f: \mathbb{R}^n \rightarrow \mathbb{R}^n\) is not well-defined, but we will later see how to solve the closely related problme of finding roots or fixed points of such a set of equations.
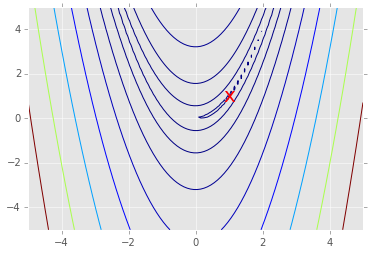
We will use the Rosenbrock “banana” function to illustrate unconstrained multivariate optimization. In 2D, this is
The function has a global minimum at (1,1) and the standard expression takes \(a = 1\) and \(b = 100\).
Conditinoning of otpimization problem¶
With these values fr \(a\) and \(b\), the problem is ill-conditioned. As we shall see, one of the factors affecting the ease of optimization is the condition number of the curvature (Hessian). When the codition number is high, the gradient may not point in the direction of the minimum, and simple gradient descent methods may be inefficient since they may be forced to take many sharp turns.
from sympy import symbols, hessian, Function, N
x, y = symbols('x y')
f = symbols('f', cls=Function)
f = 100*(y - x**2)**2 + (1 - x)**2
H = hessian(f, [x, y]).subs([(x,1), (y,1)])
print np.array(H)
print N(H.condition_number())
[[802 -400]
[-400 200]]
2508.00960127744
def rosen(x):
"""Generalized n-dimensional version of the Rosenbrock function"""
return sum(100*(x[1:]-x[:-1]**2.0)**2.0 +(1-x[:-1])**2.0)
x = np.linspace(-5, 5, 100)
y = np.linspace(-5, 5, 100)
X, Y = np.meshgrid(x, y)
Z = rosen(np.vstack([X.ravel(), Y.ravel()])).reshape((100,100))
# Note: the global minimum is at (1,1) in a tiny contour island
plt.contour(X, Y, Z, np.arange(10)**5)
plt.text(1, 1, 'x', va='center', ha='center', color='red', fontsize=20);
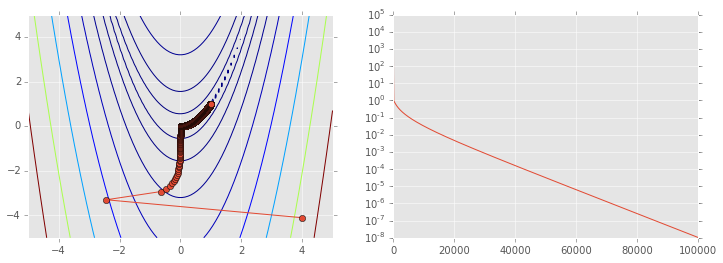
Gradient deescent¶
The gradient (or Jacobian) at a point indicates the direction of steepest ascent. Since we are looking for a minimum, one obvious possibility is to take a step in the opposite direction to the graident. We weight the size of the step by a factor \(\alpha\) known in the machine learning literature as the learning rate. If \(\alpha\) is small, the algorithm will eventually converge towards a local minimum, but it may take long time. If \(\alpha\) is large, the algorithm may converge faster, but it may also overshoot and never find the minimum. Gradient descent is also known as a first order method because it requires calculation of the first derivative at each iteration.
Some algorithms also determine the appropriate value of \(\alpha\) at each stage by using a line search, i.e.,
which is a 1D optimization problem.
As suggested above, the problem is that the gradient may not point towards the global minimum especially when the condition number is large, and we are forced to use a small \(\alpha\) for convergence. Becasue gradient descent is unreliable in practice, it is not part of the scipy optimize suite of functions, but we will write a custom function below to ilustrate how it works.
def rosen_der(x):
"""Derivative of generalized Rosen function."""
xm = x[1:-1]
xm_m1 = x[:-2]
xm_p1 = x[2:]
der = np.zeros_like(x)
der[1:-1] = 200*(xm-xm_m1**2) - 400*(xm_p1 - xm**2)*xm - 2*(1-xm)
der[0] = -400*x[0]*(x[1]-x[0]**2) - 2*(1-x[0])
der[-1] = 200*(x[-1]-x[-2]**2)
return der
def custmin(fun, x0, args=(), maxfev=None, alpha=0.0002,
maxiter=100000, tol=1e-10, callback=None, **options):
"""Implements simple gradient descent for the Rosen function."""
bestx = x0
besty = fun(x0)
funcalls = 1
niter = 0
improved = True
stop = False
while improved and not stop and niter < maxiter:
niter += 1
# the next 2 lines are gradient descent
step = alpha * rosen_der(bestx)
bestx = bestx - step
besty = fun(bestx)
funcalls += 1
if la.norm(step) < tol:
improved = False
if callback is not None:
callback(bestx)
if maxfev is not None and funcalls >= maxfev:
stop = True
break
return opt.OptimizeResult(fun=besty, x=bestx, nit=niter,
nfev=funcalls, success=(niter > 1))
def reporter(p):
"""Reporter function to capture intermediate states of optimization."""
global ps
ps.append(p)
# Initial starting position
x0 = np.array([4,-4.1])
ps = [x0]
opt.minimize(rosen, x0, method=custmin, callback=reporter)
fun: 1.0604663473471188e-08
nfev: 100001
success: True
nit: 100000
x: array([ 0.9999, 0.9998])
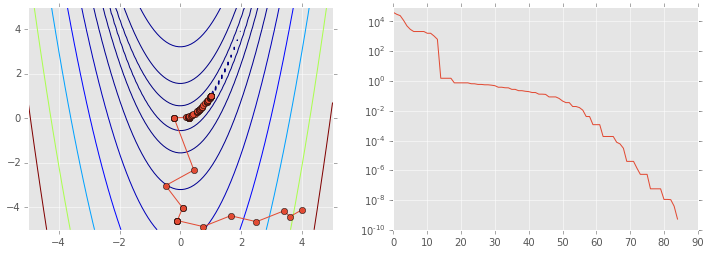
ps = np.array(ps)
plt.figure(figsize=(12,4))
plt.subplot(121)
plt.contour(X, Y, Z, np.arange(10)**5)
plt.plot(ps[:, 0], ps[:, 1], '-o')
plt.subplot(122)
plt.semilogy(range(len(ps)), rosen(ps.T));
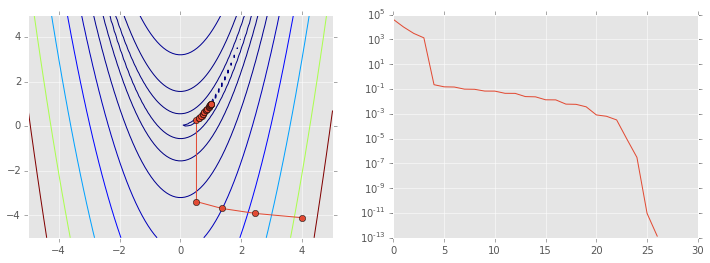
Newton’s method and variants¶
Recall Newton’s method for finding roots of a univariate function
When we are looking for a minimum, we are looking for the roots of the derivative, so
Newotn’s method can also be seen as a Taylor series approximation
At the function minimum, the derivtive is 0, so
and letting \(\Delta x = \frac{h}{2}\), we get that the Newton stpe is
The multivariate analog replaces \(f'\) with the Jacobian and \(f''\) with the Hessian, so the Newton step is
Second order methods solve for \(H^{-1}\) and so require calculation
of the Hessian (either provided or approximated uwing finite
differences). For efficiency reasons, the Hessian is not directly
inverted, but solved for using a variety of methods such as conjugate
gradient. An example of a seocnd order method in the optimize
package is Newton-GC.
from scipy.optimize import rosen, rosen_der, rosen_hess
ps = [x0]
opt.minimize(rosen, x0, method='Newton-CG', jac=rosen_der, hess=rosen_hess, callback=reporter)
status: 0
success: True
njev: 63
nfev: 38
fun: 1.3642782750354208e-13
x: array([ 1., 1.])
message: 'Optimization terminated successfully.'
nhev: 26
jac: array([ 1.2120e-04, -6.0850e-05])
ps = np.array(ps)
plt.figure(figsize=(12,4))
plt.subplot(121)
plt.contour(X, Y, Z, np.arange(10)**5)
plt.plot(ps[:, 0], ps[:, 1], '-o')
plt.subplot(122)
plt.semilogy(range(len(ps)), rosen(ps.T));
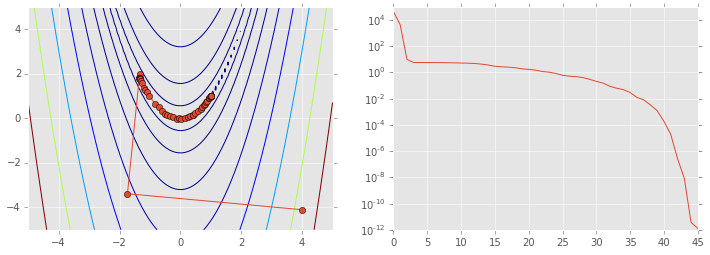
As calculating the Hessian is computationally expensive, first order
methods only use the first derivatives. Quasi-Newton methods use
functions of the first derivatives to approximate the inverse Hessian. A
well know example of the Quasi-Newoton class of algorithjms is BFGS,
named after the initials of the creators. As usual, the first
derivatives can either be provided via the jac= argument or
approximated by finite difference methods.
ps = [x0]
opt.minimize(rosen, x0, method='BFGS', callback=reporter)
status: 2
success: False
njev: 92
nfev: 379
hess_inv: array([[ 0.5004, 1.0009],
[ 1.0009, 2.0072]])
fun: 1.2922663663359423e-12
x: array([ 1., 1.])
message: 'Desired error not necessarily achieved due to precision loss.'
jac: array([ 5.1319e-05, -2.1227e-05])
ps = np.array(ps)
plt.figure(figsize=(12,4))
plt.subplot(121)
plt.contour(X, Y, Z, np.arange(10)**5)
plt.plot(ps[:, 0], ps[:, 1], '-o')
plt.subplot(122)
plt.semilogy(range(len(ps)), rosen(ps.T));
Finally, there are some optimization algorithms not based on the Newton method, but on other heuristic search strategies that do not require any derivatives, only function evaluations. One well-known example is the Nelder-Mead simplex algorithm.
ps = [x0]
opt.minimize(rosen, x0, method='nelder-mead', callback=reporter)
status: 0
nfev: 162
success: True
fun: 5.262756878429089e-10
x: array([ 1., 1.])
message: 'Optimization terminated successfully.'
nit: 85
ps = np.array(ps)
plt.figure(figsize=(12,4))
plt.subplot(121)
plt.contour(X, Y, Z, np.arange(10)**5)
plt.plot(ps[:, 0], ps[:, 1], '-o')
plt.subplot(122)
plt.semilogy(range(len(ps)), rosen(ps.T));
Constrained optimization¶
Many real-world optimization problems have constraints - for example, a set of parameters may have to sum to 1.0 (eqquality constraint), or some parameters may have to be non-negative (inequality constraint). Sometimes, the constraints can be incorporated into the function to be minimized, for example, the non-negativity constraint \(p > 0\) can be removed by substituting \(p = e^q\) and optimizing for \(q\). Using such workarounds, it may be possible to convert a constrained optimization problem into an unconstrained one, and use the methods discussed above to sovle the problem.
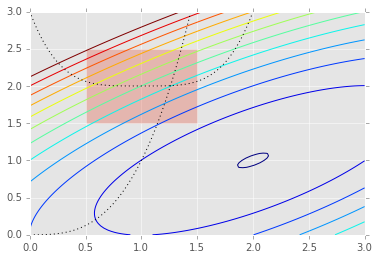
Alternatively, we can use optimization methods that allow the speicification of constraints directly in the problem statement as shown in this section. Internally, constraint violation penalties, barriers and Lagrange multpiliers are some of the methods used used to handle these constraints. We use the example provided in the Scipy tutorial to illustrate how to set constraints.
subject to the constraint
def f(x):
return -(2*x[0]*x[1] + 2*x[0] - x[0]**2 - 2*x[1]**2)
x = np.linspace(0, 3, 100)
y = np.linspace(0, 3, 100)
X, Y = np.meshgrid(x, y)
Z = f(np.vstack([X.ravel(), Y.ravel()])).reshape((100,100))
plt.contour(X, Y, Z, np.arange(-1.99,10, 1));
plt.plot(x, x**3, 'k:', linewidth=1)
plt.plot(x, (x-1)**4+2, 'k:', linewidth=1)
plt.fill([0.5,0.5,1.5,1.5], [2.5,1.5,1.5,2.5], alpha=0.3)
plt.axis([0,3,0,3])
[0, 3, 0, 3]
To set consttarints, we pass in a dictionary with keys ty;pe,
fun and jac. Note that the inequlaity cosntraint assumes a
\(C_j x \ge 0\) form. As usual, the jac is optional and will be
numerically estimted if not provided.
cons = ({'type': 'eq',
'fun' : lambda x: np.array([x[0]**3 - x[1]]),
'jac' : lambda x: np.array([3.0*(x[0]**2.0), -1.0])},
{'type': 'ineq',
'fun' : lambda x: np.array([x[1] - (x[0]-1)**4 - 2])})
bnds = ((0.5, 1.5), (1.5, 2.5))
x0 = [0, 2.5]
Unconstrained optimization
ux = opt.minimize(f, x0, constraints=None)
ux
status: 0
success: True
njev: 5
nfev: 20
hess_inv: array([[ 1. , 0.5],
[ 0.5, 0.5]])
fun: -1.9999999999999987
x: array([ 2., 1.])
message: 'Optimization terminated successfully.'
jac: array([ 0., 0.])
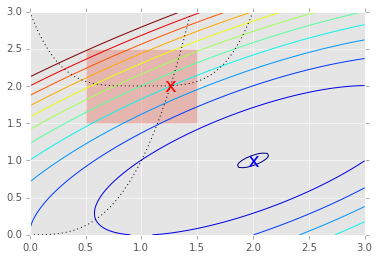
Constrained optimization
cx = opt.minimize(f, x0, bounds=bnds, constraints=cons)
cx
status: 0
success: True
njev: 5
nfev: 21
fun: 2.0499154720925521
x: array([ 1.2609, 2.0046])
message: 'Optimization terminated successfully.'
jac: array([-3.4875, 5.4967, 0. ])
nit: 5
x = np.linspace(0, 3, 100)
y = np.linspace(0, 3, 100)
X, Y = np.meshgrid(x, y)
Z = f(np.vstack([X.ravel(), Y.ravel()])).reshape((100,100))
plt.contour(X, Y, Z, np.arange(-1.99,10, 1));
plt.plot(x, x**3, 'k:', linewidth=1)
plt.plot(x, (x-1)**4+2, 'k:', linewidth=1)
plt.text(ux['x'][0], ux['x'][1], 'x', va='center', ha='center', size=20, color='blue')
plt.text(cx['x'][0], cx['x'][1], 'x', va='center', ha='center', size=20, color='red')
plt.fill([0.5,0.5,1.5,1.5], [2.5,1.5,1.5,2.5], alpha=0.3)
plt.axis([0,3,0,3]);
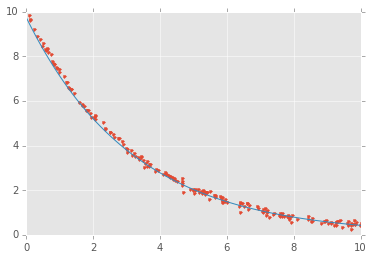
Curve fitting¶
Sometimes, we simply want to use non-linear least squares to fit a
function to data, perhaps to estimate paramters for a mechanistic or
phenomenological model. The curve_fit function uses the quasi-Newton
Levenberg-Marquadt aloorithm to perform such fits. Behind the scnees,
curve_fit is just a wrapper around the leastsq function that we
have already seen in a more conveneint format.
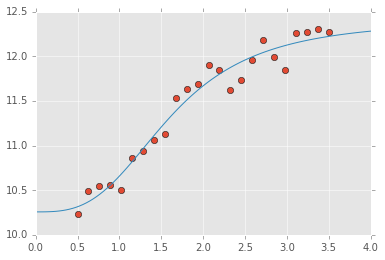
from scipy.optimize import curve_fit
def logistic4(x, a, b, c, d):
"""The four paramter logistic function is often used to fit dose-response relationships."""
return ((a-d)/(1.0+((x/c)**b))) + d
nobs = 24
xdata = np.linspace(0.5, 3.5, nobs)
ptrue = [10, 3, 1.5, 12]
ydata = logistic4(xdata, *ptrue) + 0.5*np.random.random(nobs)
popt, pcov = curve_fit(logistic4, xdata, ydata)
perr = yerr=np.sqrt(np.diag(pcov))
print 'Param\tTrue\tEstim (+/- 1 SD)'
for p, pt, po, pe in zip('abcd', ptrue, popt, perr):
print '%s\t%5.2f\t%5.2f (+/-%5.2f)' % (p, pt, po, pe)
Param True Estim (+/- 1 SD)
a 10.00 10.26 (+/- 0.15)
b 3.00 3.06 (+/- 0.76)
c 1.50 1.62 (+/- 0.11)
d 12.00 12.41 (+/- 0.20)
x = np.linspace(0, 4, 100)
y = logistic4(x, *popt)
plt.plot(xdata, ydata, 'o')
plt.plot(x, y);
Finding paraemeters for ODE models¶
This is a specialized application of curve_fit, in which the curve
to be fitted is defined implcitly by an ordinary differentail equation
and we want to use observed data to estiamte the parameters \(k\) and the initial value \(x_0\). Of course this can be explicitly solved but the same approach can be used to find multiple paraemters for \(n\)-dimensional systems of ODEs.
A more elaborate example for fitting a system of ODEs to model the zombie apocalypse
from scipy.integrate import odeint
def f(x, t, k): “”“Simple exponential decay.”“” return -k*x
def x(t, k, x0): “”” Solution to the ODE x’(t) = f(t,x,k) with initial condition x(0) = x0 “”” x = odeint(f, x0, t, args=(k,)) return x.ravel()
# True parameter values
x0_ = 10
k_ = 0.1*np.pi
# Some random data genererated from closed form soltuion plus Gaussian noise
ts = np.sort(np.random.uniform(0, 10, 200))
xs = x0_*np.exp(-k_*ts) + np.random.normal(0,0.1,200)
popt, cov = curve_fit(x, ts, xs)
k_opt, x0_opt = popt
print("k = %g" % k_opt)
print("x0 = %g" % x0_opt)
k = 0.314062
x0 = 9.754
import matplotlib.pyplot as plt
t = np.linspace(0, 10, 100)
plt.plot(ts, xs, '.', t, x(t, k_opt, x0_opt), '-');
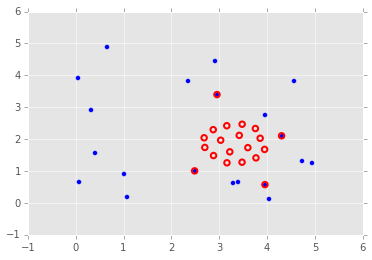
Optimization of graph node placement¶
To show the many different applications of optimization, here is an exmaple using optimization to change the layout of nodes of a graph. We use a physcial analogy - nodes are connected by springs, and the springs resist deformation from their natural length \(l_{ij}\). Some nodes are pinned to their initial locations while others are free to move. Because the initial confiugraiton of nodes does not have springs at their natural lenght, there is tension resulting in a high potential energy \(U\), given by the physics formula shown below. Optimization finds the configuraiton of lowest potential energy given that some nodes are fixed (set up as boundary constraints on the positions of the nodes).
Note that the ordination algorithm Multi-Dimenisonal Scaling (MDS) works on a very similar idea - take a high dimensional data set in \(\mathbb{R}^n\), and project down to a lower dimension (\(\mathbb{R}^k\)) such that the sum of distances \(d_n(x_i, x_j) - d_k(x_i, x_j)\), where \(d_n\) adn \(d_k\) are some measure of distacce between two points \(x_i\) and \(x_j\) in \(n\) and \(d\) dimesniosn respectively, is minimized. MDS is often used in exploratory analysis of high-dimensional data to get some intuitive understanding of its “structure”.
from scipy.spatial.distance import pdist, squareform
- P0 is the initial location of nodes
- P is the minimal energy location of nodes given constraints
- A is a connectivity matrix - there is a spring between \(i\) and \(j\) if \(A_{ij} = 1\)
- \(L_{ij}\) is the resting length of the spring connecting \(i\) and \(j\)
- In addition, there are a number of
fixednodes whose positions are pinned.
n = 20
k = 1 # spring stiffness
P0 = np.random.uniform(0, 5, (n,2))
A = np.ones((n, n))
A[np.tril_indices_from(A)] = 0
L = A.copy()
def energy(P):
P = P.reshape((-1, 2))
D = squareform(pdist(P))
return 0.5*(k * A * (D - L)**2).sum()
energy(P0.ravel())
542.8714
# fix the position of the first few nodes just to show constraints
fixed = 4
bounds = (np.repeat(P0[:fixed,:].ravel(), 2).reshape((-1,2)).tolist() +
[[None, None]] * (2*(n-fixed)))
bounds[:fixed*2+4]
[[4.3040, 4.3040],
[2.1045, 2.1045],
[2.4856, 2.4856],
[1.0051, 1.0051],
[2.9531, 2.9531],
[3.3977, 3.3977],
[3.9562, 3.9562],
[0.5742, 0.5742],
[None, None],
[None, None],
[None, None],
[None, None]]
sol = opt.minimize(energy, P0.ravel(), bounds=bounds)
plt.scatter(P0[:, 0], P0[:, 1], s=25)
P = sol.x.reshape((-1,2))
plt.scatter(P[:, 0], P[:, 1], edgecolors='red', facecolors='none', s=30, linewidth=2);
Optimization of standard statistical models¶
When we solve standard statistical problems, an optimization procedure similar to the ones discussed here is performed. For example, consider multivariate logistic regression - typically, a Newton-like alogirhtm known as iteratively reweighted least squares (IRLS) is used to find the maximum likelihood estimate for the generalized linear model family. However, using one of the multivariate scalar minimization methods shown above will also work, for example, the BFGS minimization algorithm.
The take home message is that there is nothing magic going on when Python or R fits a statistical model using a formula - all that is happening is that the objective function is set to be the negative of the log likelihood, and the minimum found using some first or second order optimzation algorithm.
import statsmodels.api as sm
Logistic regression as optimization¶
Suppose we have a binary outcome measure \(Y \in {0,1}\) that is conditinal on some input variable (vector) \(x \in (-\infty, +\infty)\). Let the conditioanl probability be \(p(x) = P(Y=y | X=x)\). Given some data, one simple probability model is \(p(x) = \beta_0 + x\cdot\beta\) - i.e. linear regression. This doesn’t really work for the obvious reason that \(p(x)\) must be between 0 and 1 as \(x\) ranges across the real line. One simple way to fix this is to use the transformation \(g(x) = \frac{p(x)}{1 - p(x)} = \beta_0 + x.\beta\). Solving for \(p\), we get
As you all know very well, this is logistic regression.
Suppose we have \(n\) data points \((x_i, y_i)\) where \(x_i\) is a vector of features and \(y_i\) is an observed class (0 or 1). For each event, we either have “success” (\(y = 1\)) or “failure” (\(Y = 0\)), so the likelihood looks like the product of Bernoulli random variables. According to the logistic model, the probability of success is \(p(x_i)\) if \(y_i = 1\) and \(1-p(x_i)\) if \(y_i = 0\). So the likelihood is
and the log-likelihood is
Using the standard ‘trick’, if we augment the matrix \(X\) with a column of 1s, we can write \(\beta_0 + x_i\cdot\beta\) as just \(X\beta\).
df_ = pd.read_csv("http://www.ats.ucla.edu/stat/data/binary.csv")
df_.head()
| admit | gre | gpa | rank | |
|---|---|---|---|---|
| 0 | 0 | 380 | 3.61 | 3 |
| 1 | 1 | 660 | 3.67 | 3 |
| 2 | 1 | 800 | 4.00 | 1 |
| 3 | 1 | 640 | 3.19 | 4 |
| 4 | 0 | 520 | 2.93 | 4 |
# We will ignore the rank categorical value
cols_to_keep = ['admit', 'gre', 'gpa']
df = df_[cols_to_keep]
df.insert(1, 'dummy', 1)
df.head()
| admit | dummy | gre | gpa | |
|---|---|---|---|---|
| 0 | 0 | 1 | 380 | 3.61 |
| 1 | 1 | 1 | 660 | 3.67 |
| 2 | 1 | 1 | 800 | 4.00 |
| 3 | 1 | 1 | 640 | 3.19 |
| 4 | 0 | 1 | 520 | 2.93 |
Solving as a GLM with IRLS¶
This is very similar to what you would do in R, only using Python’s
statsmodels package. The GLM solver uses a special variant of
Newton’s method known as iteratively reweighted least squares (IRLS),
which will be further desribed in the lecture on multivarite and
constrained optimizaiton.
model = sm.GLM.from_formula('admit ~ gre + gpa',
data=df, family=sm.families.Binomial())
fit = model.fit()
fit.summary()
| Dep. Variable: | admit | No. Observations: | 400 |
|---|---|---|---|
| Model: | GLM | Df Residuals: | 397 |
| Model Family: | Binomial | Df Model: | 2 |
| Link Function: | logit | Scale: | 1.0 |
| Method: | IRLS | Log-Likelihood: | -240.17 |
| Date: | Wed, 11 Feb 2015 | Deviance: | 480.34 |
| Time: | 17:29:26 | Pearson chi2: | 398. |
| No. Iterations: | 5 |
| coef | std err | t | P>|t| | [95.0% Conf. Int.] | |
|---|---|---|---|---|---|
| Intercept | -4.9494 | 1.075 | -4.604 | 0.000 | -7.057 -2.842 |
| gre | 0.0027 | 0.001 | 2.544 | 0.011 | 0.001 0.005 |
| gpa | 0.7547 | 0.320 | 2.361 | 0.018 | 0.128 1.381 |
Solving as logistic model with bfgs¶
Note that you can choose any of the scipy.optimize algotihms to fit the maximum likelihood model. This knows about higher order derivatives, so will be more accurate than homebrew version.
model2 = sm.Logit.from_formula('admit ~ %s' % '+'.join(df.columns[2:]), data=df)
fit2 = model2.fit(method='bfgs', maxiter=100)
fit2.summary()
Optimization terminated successfully.
Current function value: 0.600430
Iterations: 23
Function evaluations: 65
Gradient evaluations: 54
| Dep. Variable: | admit | No. Observations: | 400 |
|---|---|---|---|
| Model: | Logit | Df Residuals: | 397 |
| Method: | MLE | Df Model: | 2 |
| Date: | Wed, 11 Feb 2015 | Pseudo R-squ.: | 0.03927 |
| Time: | 17:31:19 | Log-Likelihood: | -240.17 |
| converged: | True | LL-Null: | -249.99 |
| LLR p-value: | 5.456e-05 |
| coef | std err | z | P>|z| | [95.0% Conf. Int.] | |
|---|---|---|---|---|---|
| Intercept | -4.9494 | 1.075 | -4.604 | 0.000 | -7.057 -2.842 |
| gre | 0.0027 | 0.001 | 2.544 | 0.011 | 0.001 0.005 |
| gpa | 0.7547 | 0.320 | 2.361 | 0.018 | 0.128 1.381 |
Home-brew logistic regression using a generic minimization function¶
This is to show that there is no magic going on - you can write the function to minimize directly from the log-likelihood eqaution and run a minimizer. It will be more accurate if you also provide the derivative (+/- the Hessian for seocnd order methods), but using just the function and numerical approximations to the derivative will also work. As usual, this is for illustration so you understand what is going on - when there is a library function available, youu should probably use that instead.
def f(beta, y, x):
"""Minus log likelihood function for logistic regression."""
return -((-np.log(1 + np.exp(np.dot(x, beta)))).sum() + (y*(np.dot(x, beta))).sum())
beta0 = np.zeros(3)
opt.minimize(f, beta0, args=(df['admit'], df.ix[:, 'dummy':]), method='BFGS', options={'gtol':1e-2})
status: 0
success: True
njev: 16
nfev: 80
hess_inv: array([[ 1.1525e+00, -2.7800e-04, -2.8160e-01],
[ -2.7800e-04, 1.1663e-06, -1.2190e-04],
[ -2.8160e-01, -1.2190e-04, 1.0259e-01]])
fun: 240.1719908951104
x: array([ -4.9493e+00, 2.6903e-03, 7.5473e-01])
message: 'Optimization terminated successfully.'
jac: array([ 9.1553e-05, -3.2158e-03, 4.5776e-04])