Gradient Descent Optimizations¶
Mini-batch and stochastic gradient descent is widely used in deep learning, where the large number of parameters and limited memory make the use of more sophisticated optimization methods impractical. Many methods have been proposed to accelerate gradient descent in this context, and here we sketch the ideas behind some of the most popular algorithms.
[1]:
%matplotlib inline
[2]:
import matplotlib.pyplot as plt
import numpy as np
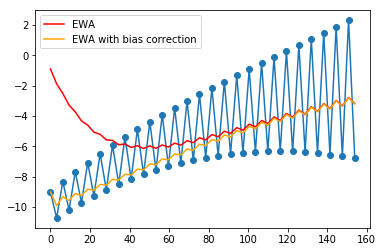
Smoothing with exponentially weighted averages¶
[3]:
n = 50
x = np.arange(n) * np.pi
y = np.cos(x) * np.exp(x/100) - 10*np.exp(-0.01*x)
Exponentially weighted average¶
The exponentially weighted average adds a fraction \(\beta\) of the current value to a leaky running sum of past values. Effectively, the contribution from the \(t-n\)th value is scaled by
For example, here are the contributions to the current value after 5 iterations (iteration 5 is the current iteration)
iteration |
contribution |
|---|---|
1 |
\(\beta^4(1 - \beta)\) |
2 |
\(\beta^3(1 - \beta)\) |
3 |
\(\beta^2(1 - \beta)\) |
4 |
\(\beta^1(1 - \beta)\) |
5 |
\((1 - \beta)\) |
Since \(\beta \lt 1\), the contribution decreases exponentially with the passage of time. Effectively, this acts as a smoother for a function.
[4]:
def ewa(y, beta):
"""Exponentially weighted average."""
n = len(y)
zs = np.zeros(n)
z = 0
for i in range(n):
z = beta*z + (1 - beta)*y[i]
zs[i] = z
return zs
Exponentially weighted average with bias correction¶
Since the EWA starts from 0, there is an initial bias. This can be corrected by scaling with
where \(t\) is the iteration number.
[5]:
def ewabc(y, beta):
"""Exponentially weighted average with bias correction."""
n = len(y)
zs = np.zeros(n)
z = 0
for i in range(n):
z = beta*z + (1 - beta)*y[i]
zc = z/(1 - beta**(i+1))
zs[i] = zc
return zs
[6]:
beta = 0.9
plt.plot(x, y, 'o-')
plt.plot(x, ewa(y, beta), c='red', label='EWA')
plt.plot(x, ewabc(y, beta), c='orange', label='EWA with bias correction')
plt.legend()
pass
Momentum in 1D¶
Momentum comes from physics, where the contribution of the gradient is to the velocity, not the position. Hence we create an accessory variable \(v\) and increment it with the gradient. The position is then updated with the velocity in place of the gradient. The analogy is that we can think of the parameter \(x\) as a particle in an energy well with potential energy \(U = mgh\) where \(h\) is given by our objective function \(f\). The force generated is a function of the rat of change of potential energy \(F \propto \nabla U \propto \nabla f\), and we use \(F = ma\) to get that the acceleration \(a \propto \nabla f\). Finally, we integrate \(a\) over time to get the velocity \(v\) and integrate \(v\) to get the displacement \(x\). Note that we need to damp the velocity otherwise the particle would just oscillate forever.
We use a version of the update that simply treats the velocity as an exponentially weighted average popularized by Andrew Ng in his Coursera course. This is the same as the momentum scheme motivated by physics with some rescaling of constants.
[7]:
def f(x):
return x**2
[8]:
def grad(x):
return 2*x
[9]:
def gd(x, grad, alpha, max_iter=10):
xs = np.zeros(1 + max_iter)
xs[0] = x
for i in range(max_iter):
x = x - alpha * grad(x)
xs[i+1] = x
return xs
[10]:
def gd_momentum(x, grad, alpha, beta=0.9, max_iter=10):
xs = np.zeros(1 + max_iter)
xs[0] = x
v = 0
for i in range(max_iter):
v = beta*v + (1-beta)*grad(x)
vc = v/(1+beta**(i+1))
x = x - alpha * vc
xs[i+1] = x
return xs
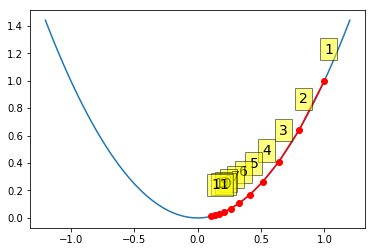
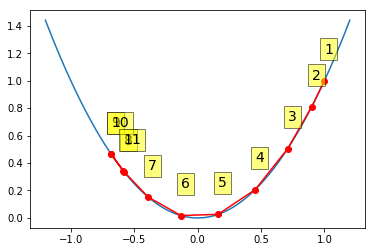
Gradient descent with moderate step size¶
[11]:
alpha = 0.1
x0 = 1
xs = gd(x0, grad, alpha)
xp = np.linspace(-1.2, 1.2, 100)
plt.plot(xp, f(xp))
plt.plot(xs, f(xs), 'o-', c='red')
for i, (x, y) in enumerate(zip(xs, f(xs)), 1):
plt.text(x, y+0.2, i,
bbox=dict(facecolor='yellow', alpha=0.5), fontsize=14)
pass
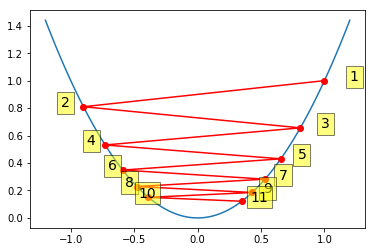
Gradient descent with large step size¶
When the step size is too large, gradient descent can oscillate and even diverge.
[12]:
alpha = 0.95
xs = gd(1, grad, alpha)
xp = np.linspace(-1.2, 1.2, 100)
plt.plot(xp, f(xp))
plt.plot(xs, f(xs), 'o-', c='red')
for i, (x, y) in enumerate(zip(xs, f(xs)), 1):
plt.text(x*1.2, y, i,
bbox=dict(facecolor='yellow', alpha=0.5), fontsize=14)
pass
Gradient descent with momentum¶
Momentum results in cancellation of gradient changes in opposite directions, and hence damps out oscillations while amplifying consistent changes in the same direction. This is perhaps clearer in the 2D example below.
[13]:
alpha = 0.95
xs = gd_momentum(1, grad, alpha, beta=0.9)
xp = np.linspace(-1.2, 1.2, 100)
plt.plot(xp, f(xp))
plt.plot(xs, f(xs), 'o-', c='red')
for i, (x, y) in enumerate(zip(xs, f(xs)), 1):
plt.text(x, y+0.2, i,
bbox=dict(facecolor='yellow', alpha=0.5), fontsize=14)
pass
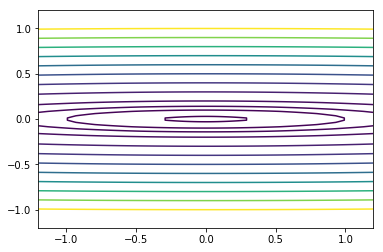
Momentum and RMSprop in 2D¶
[14]:
def f2(x):
return x[0]**2 + 100*x[1]**2
[15]:
def grad2(x):
return np.array([2*x[0], 200*x[1]])
[16]:
x = np.linspace(-1.2, 1.2, 100)
y = np.linspace(-1.2, 1.2, 100)
X, Y = np.meshgrid(x, y)
levels = [0.1,1,2,4,9, 16, 25, 36, 49, 64, 81, 100]
Z = x**2 + 100*Y**2
c = plt.contour(X, Y, Z, levels)
pass
[17]:
def gd2(x, grad, alpha, max_iter=10):
xs = np.zeros((1 + max_iter, x.shape[0]))
xs[0,:] = x
for i in range(max_iter):
x = x - alpha * grad(x)
xs[i+1,:] = x
return xs
[18]:
def gd2_momentum(x, grad, alpha, beta=0.9, max_iter=10):
xs = np.zeros((1 + max_iter, x.shape[0]))
xs[0, :] = x
v = 0
for i in range(max_iter):
v = beta*v + (1-beta)*grad(x)
vc = v/(1+beta**(i+1))
x = x - alpha * vc
xs[i+1, :] = x
return xs
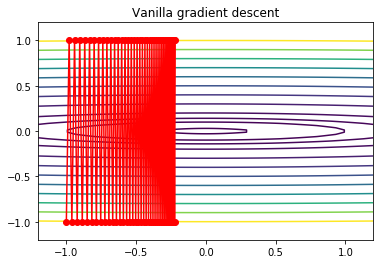
Gradient descent with large step size¶
We get severe oscillations.
[19]:
alpha = 0.01
x0 = np.array([-1,-1])
xs = gd2(x0, grad2, alpha, max_iter=75)
[20]:
x = np.linspace(-1.2, 1.2, 100)
y = np.linspace(-1.2, 1.2, 100)
X, Y = np.meshgrid(x, y)
levels = [0.1,1,2,4,9, 16, 25, 36, 49, 64, 81, 100]
Z = x**2 + 100*Y**2
c = plt.contour(X, Y, Z, levels)
plt.plot(xs[:, 0], xs[:, 1], 'o-', c='red')
plt.title('Vanilla gradient descent')
pass
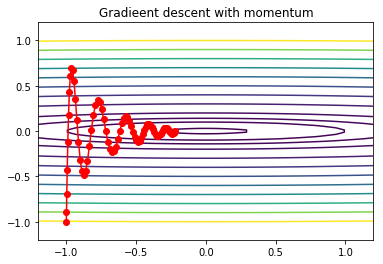
Gradient descent with momentum¶
The damping effect is clear.
[21]:
alpha = 0.01
x0 = np.array([-1,-1])
xs = gd2_momentum(x0, grad2, alpha, beta=0.9, max_iter=75)
[22]:
x = np.linspace(-1.2, 1.2, 100)
y = np.linspace(-1.2, 1.2, 100)
X, Y = np.meshgrid(x, y)
levels = [0.1,1,2,4,9, 16, 25, 36, 49, 64, 81, 100]
Z = x**2 + 100*Y**2
c = plt.contour(X, Y, Z, levels)
plt.plot(xs[:, 0], xs[:, 1], 'o-', c='red')
plt.title('Gradieent descent with momentum')
pass
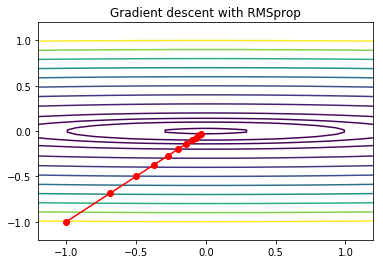
Gradient descent with RMSprop¶
RMSprop scales the learning rate in each direction by the square root of the exponentially weighted sum of squared gradients. Near a saddle or any plateau, there are directions where the gradient is very small - RMSporp encourages larger steps in those directions, allowing faster escape.
[23]:
def gd2_rmsprop(x, grad, alpha, beta=0.9, eps=1e-8, max_iter=10):
xs = np.zeros((1 + max_iter, x.shape[0]))
xs[0, :] = x
v = 0
for i in range(max_iter):
v = beta*v + (1-beta)*grad(x)**2
x = x - alpha * grad(x) / (eps + np.sqrt(v))
xs[i+1, :] = x
return xs
[24]:
alpha = 0.1
x0 = np.array([-1,-1])
xs = gd2_rmsprop(x0, grad2, alpha, beta=0.9, max_iter=10)
[25]:
x = np.linspace(-1.2, 1.2, 100)
y = np.linspace(-1.2, 1.2, 100)
X, Y = np.meshgrid(x, y)
levels = [0.1,1,2,4,9, 16, 25, 36, 49, 64, 81, 100]
Z = x**2 + 100*Y**2
c = plt.contour(X, Y, Z, levels)
plt.plot(xs[:, 0], xs[:, 1], 'o-', c='red')
plt.title('Gradient descent with RMSprop')
pass
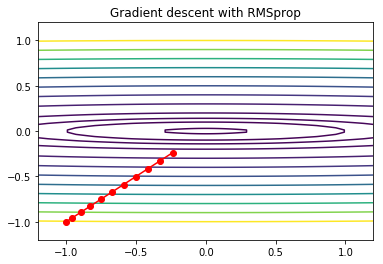
ADAM¶
ADAM (Adaptive Moment Estimation) combines the ideas of momentum, RMSprop and bias correction. It is probably the most popular gradient descent method in current deep learning practice.
[26]:
def gd2_adam(x, grad, alpha, beta1=0.9, beta2=0.999, eps=1e-8, max_iter=10):
xs = np.zeros((1 + max_iter, x.shape[0]))
xs[0, :] = x
m = 0
v = 0
for i in range(max_iter):
m = beta1*m + (1-beta1)*grad(x)
v = beta2*v + (1-beta2)*grad(x)**2
mc = m/(1+beta1**(i+1))
vc = v/(1+beta2**(i+1))
x = x - alpha * m / (eps + np.sqrt(vc))
xs[i+1, :] = x
return xs
[27]:
alpha = 0.1
x0 = np.array([-1,-1])
xs = gd2_adam(x0, grad2, alpha, beta1=0.9, beta2=0.9, max_iter=10)
[28]:
x = np.linspace(-1.2, 1.2, 100)
y = np.linspace(-1.2, 1.2, 100)
X, Y = np.meshgrid(x, y)
levels = [0.1,1,2,4,9, 16, 25, 36, 49, 64, 81, 100]
Z = x**2 + 100*Y**2
c = plt.contour(X, Y, Z, levels)
plt.plot(xs[:, 0], xs[:, 1], 'o-', c='red')
plt.title('Gradient descent with RMSprop')
pass
Implementing a custom optimization routine for scipy.optimize¶
Gradient descent is not one of the methods available in scipy.optimize. However we can implement our own version by following the API of the minimize function.
[29]:
import scipy.optimize as opt
import scipy.linalg as la
[30]:
def custmin(fun, x0, args=(), maxfev=None, alpha=0.0002,
maxiter=100000, tol=1e-10, callback=None, **options):
"""Implements simple gradient descent for the Rosen function."""
bestx = x0
bestf = fun(x0)
funcalls = 1
niter = 0
improved = True
stop = False
while improved and not stop and niter < maxiter:
niter += 1
# the next 2 lines are gradient descent
step = alpha * rosen_der(bestx)
bestx = bestx - step
bestf = fun(bestx)
funcalls += 1
if la.norm(step) < tol:
improved = False
if callback is not None:
callback(bestx)
if maxfev is not None and funcalls >= maxfev:
stop = True
break
return opt.OptimizeResult(fun=bestf, x=bestx, nit=niter,
nfev=funcalls, success=(niter > 1))
[31]:
def reporter(p):
"""Reporter function to capture intermediate states of optimization."""
global ps
ps.append(p)
Test on Rosenbrock banana function¶
We will use the Rosenbrock “banana” function to illustrate unconstrained multivariate optimization. In 2D, this is
The function has a global minimum at (1,1) and the standard expression takes \(a = 1\) and \(b = 100\).
Conditioning of optimization problem¶
With these values for \(a\) and \(b\), the problem is ill-conditioned. As we shall see, one of the factors affecting the ease of optimization is the condition number of the curvature (Hessian). When the condition number is high, the gradient may not point in the direction of the minimum, and simple gradient descent methods may be inefficient since they may be forced to take many sharp turns.
For the 2D version, we have
and can calculate the Hessian to be
[32]:
H = np.array([
[802, -400],
[-400, 200]
])
[33]:
np.linalg.cond(H)
[33]:
2508.009601277298
[34]:
U, s, Vt = np.linalg.svd(H)
s[0]/s[1]
[34]:
2508.0096012772983
Function to minimize¶
[35]:
def rosen(x):
"""Generalized n-dimensional version of the Rosenbrock function"""
return sum(100*(x[1:]-x[:-1]**2.0)**2.0 +(1-x[:-1])**2.0)
[36]:
def rosen_der(x):
"""Derivative of generalized Rosen function."""
xm = x[1:-1]
xm_m1 = x[:-2]
xm_p1 = x[2:]
der = np.zeros_like(x)
der[1:-1] = 200*(xm-xm_m1**2) - 400*(xm_p1 - xm**2)*xm - 2*(1-xm)
der[0] = -400*x[0]*(x[1]-x[0]**2) - 2*(1-x[0])
der[-1] = 200*(x[-1]-x[-2]**2)
return der
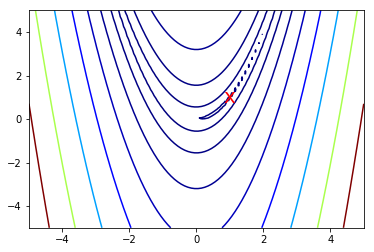
Why is the condition number so large?¶
[37]:
x = np.linspace(-5, 5, 100)
y = np.linspace(-5, 5, 100)
X, Y = np.meshgrid(x, y)
Z = rosen(np.vstack([X.ravel(), Y.ravel()])).reshape((100,100))
[38]:
# Note: the global minimum is at (1,1) in a tiny contour island
plt.contour(X, Y, Z, np.arange(10)**5, cmap='jet')
plt.text(1, 1, 'x', va='center', ha='center', color='red', fontsize=20)
pass
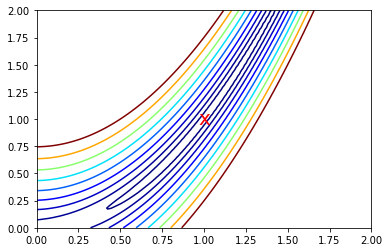
Zooming in to the global minimum at (1,1)¶
[39]:
x = np.linspace(0, 2, 100)
y = np.linspace(0, 2, 100)
X, Y = np.meshgrid(x, y)
Z = rosen(np.vstack([X.ravel(), Y.ravel()])).reshape((100,100))
[40]:
plt.contour(X, Y, Z, [rosen(np.array([k, k])) for k in np.linspace(1, 1.5, 10)], cmap='jet')
plt.text(1, 1, 'x', va='center', ha='center', color='red', fontsize=20)
pass
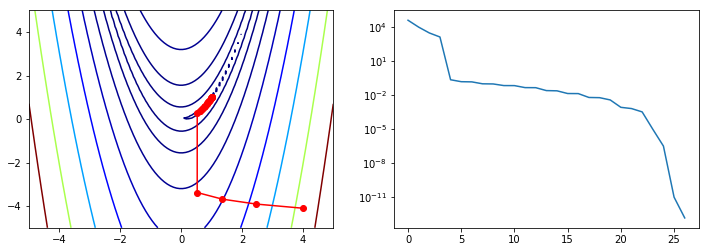
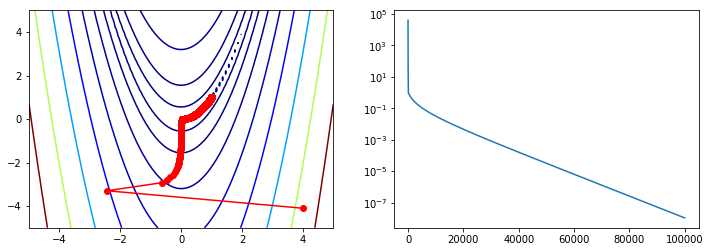
We will use our custom gradient descent to minimize the banana function¶
Helpful Hint¶
One of the most common causes of failure of optimization is because the gradient or Hessian function is specified incorrectly. You can check for this using check_grad which compares the analytical gradient with one calculated using finite differences.
[41]:
from scipy.optimize import check_grad
for x in np.random.uniform(-2,2,(10,2)):
print(x, check_grad(rosen, rosen_der, x))
[ 1.48907302 -1.42171331] 3.04092560512107e-05
[-0.48887404 1.21108406] 1.0685858595103707e-06
[-1.1971752 1.28731448] 9.014975946452588e-06
[-0.74543228 0.77030133] 3.1276750146010007e-06
[ 0.24111646 -1.65737227] 7.678560202206516e-06
[-1.37253259 -1.06738594] 2.2075707844094206e-05
[-0.16354856 0.61330733] 2.526511024327562e-06
[-1.20574923 0.20626545] 1.3748984984515249e-05
[ 1.73282778 -1.84865849] 3.4902945985726736e-05
[ 0.4104856 -1.81645528] 4.023697388337955e-06
[42]:
# Initial starting position
x0 = np.array([4,-4.1])
ps = [x0]
opt.minimize(rosen, x0, method=custmin, callback=reporter)
[42]:
fun: 1.060466347344834e-08
nfev: 100001
nit: 100000
success: True
x: array([0.9998971 , 0.99979381])
[43]:
x = np.linspace(-5, 5, 100)
y = np.linspace(-5, 5, 100)
X, Y = np.meshgrid(x, y)
Z = rosen(np.vstack([X.ravel(), Y.ravel()])).reshape((100,100))
[44]:
ps = np.array(ps)
plt.figure(figsize=(12,4))
plt.subplot(121)
plt.contour(X, Y, Z, np.arange(10)**5, cmap='jet')
plt.plot(ps[:, 0], ps[:, 1], '-ro')
plt.subplot(122)
plt.semilogy(range(len(ps)), rosen(ps.T))
pass
Comparison with standard algorithms¶
Note that all these methods take far fewer function iterations and function evaluations to find the minimum compared with vanilla gradient descent.
Many of these are based on estimating the Newton direction. Recall Newton’s method for finding roots of a univariate function
When we are looking for a minimum, we are looking for the roots of the derivative \(f'(x)\), so
Newton’s method can also be seen as a Taylor series approximation
At the function minimum, the derivative is 0, so \begin{align} \frac{f(x+h) - f(x)}{h} &= f'(x) + \frac{h}{2}f''(x) \\ 0 &= f'(x) + \frac{h}{2}f''(x) \end{align}
and letting \(\Delta x = \frac{h}{2}\), we get that the Newton step is
The multivariate analog replaces \(f'\) with the Jacobian and \(f''\) with the Hessian, so the Newton step is
Slightly more rigorously, we can optimize the quadratic multivariate Taylor expansion
Differentiating with respect to the direction vector \(p\) and setting to zero, we get
giving
[45]:
from scipy.optimize import rosen, rosen_der, rosen_hess
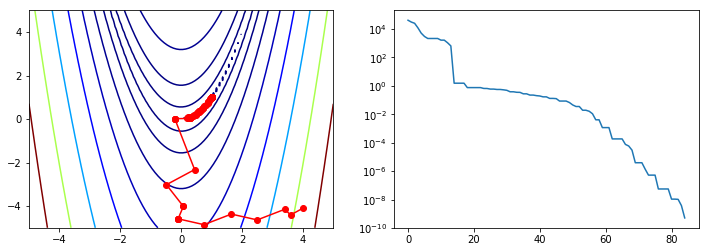
Nelder-Mead¶
There are some optimization algorithms not based on the Newton method, but on other heuristic search strategies that do not require any derivatives, only function evaluations. One well-known example is the Nelder-Mead simplex algorithm.
[46]:
ps = [x0]
opt.minimize(rosen, x0, method='nelder-mead', callback=reporter)
[46]:
final_simplex: (array([[0.99998846, 0.99997494],
[0.99994401, 0.99989075],
[1.0000023 , 1.0000149 ]]), array([5.26275688e-10, 3.87529507e-09, 1.06085894e-08]))
fun: 5.262756878429089e-10
message: 'Optimization terminated successfully.'
nfev: 162
nit: 85
status: 0
success: True
x: array([0.99998846, 0.99997494])
[47]:
ps = np.array(ps)
plt.figure(figsize=(12,4))
plt.subplot(121)
plt.contour(X, Y, Z, np.arange(10)**5, cmap='jet')
plt.plot(ps[:, 0], ps[:, 1], '-ro')
plt.subplot(122)
plt.semilogy(range(len(ps)), rosen(ps.T));
BFGS¶
As calculating the Hessian is computationally expensive, sometimes first order methods that only use the first derivatives are preferred. Quasi-Newton methods use functions of the first derivatives to approximate the inverse Hessian. A well know example of the Quasi-Newoton class of algorithjms is BFGS, named after the initials of the creators. As usual, the first derivatives can either be provided via the jac= argument or approximated by finite difference methods.
[48]:
ps = [x0]
opt.minimize(rosen, x0, method='Newton-CG', jac=rosen_der, hess=rosen_hess, callback=reporter)
[48]:
fun: 1.3642782750354208e-13
jac: array([ 1.21204353e-04, -6.08502470e-05])
message: 'Optimization terminated successfully.'
nfev: 38
nhev: 26
nit: 26
njev: 63
status: 0
success: True
x: array([0.99999963, 0.99999926])
[49]:
ps = np.array(ps)
plt.figure(figsize=(12,4))
plt.subplot(121)
plt.contour(X, Y, Z, np.arange(10)**5, cmap='jet')
plt.plot(ps[:, 0], ps[:, 1], '-ro')
plt.subplot(122)
plt.semilogy(range(len(ps)), rosen(ps.T))
pass

Newton-CG¶
Second order methods solve for \(H^{-1}\) and so require calculation of the Hessian (either provided or approximated using finite differences). For efficiency reasons, the Hessian is not directly inverted, but solved for using a variety of methods such as conjugate gradient. An example of a second order method in the optimize package is Newton-GC.
[50]:
ps = [x0]
opt.minimize(rosen, x0, method='Newton-CG', jac=rosen_der, hess=rosen_hess, callback=reporter)
[50]:
fun: 1.3642782750354208e-13
jac: array([ 1.21204353e-04, -6.08502470e-05])
message: 'Optimization terminated successfully.'
nfev: 38
nhev: 26
nit: 26
njev: 63
status: 0
success: True
x: array([0.99999963, 0.99999926])
[51]:
ps = np.array(ps)
plt.figure(figsize=(12,4))
plt.subplot(121)
plt.contour(X, Y, Z, np.arange(10)**5, cmap='jet')
plt.plot(ps[:, 0], ps[:, 1], '-ro')
plt.subplot(122)
plt.semilogy(range(len(ps)), rosen(ps.T))
pass